
เมื่อไม่กี่ปีที่ผ่านมาการฟื้นฟูป่าที่อ้างอิงหลักการเชิงวิทยาศาสตร์ถูกนำมาใช้และให้ความสนใจมากขึ้น แต่ปัจจุบันหลักการเดิมที่ล้าสมัยก็ยังคงถูกนำมาใช้อยูู่
โดยทั่วไปโครงการฟื้นฟูป่ามักใช้แรงงานคนจำนวนมาก เพื่อการขนย้ายต้นกล้า อุปกรณ์และเครื่องมือต่างๆ ด้วยระยะทางที่ห่างไกล ลาดชันและยากต่อการเข้าถึง ใช้มีดพร้าในการกำจัดวัชพืชและขุดหลุมปลูกด้วยจอบ ซึ่งล้วนแล้วแต่เป็นวิธีที่เคยเกิดขึ้นในยุคหินทั้งนั้น
หนึ่งในปัญหาของการฟื้นฟูป่าคือความลำบากของการเข้าถึงพื้นที่ เนื่องจากพื้นที่ราบติดถนน มักถูกจับจองทำเป็นไร่เกษตรกรรม ดังนั้น พื้นที่สำหรับการฟื้นฟูป่าส่วนใหญ่จึงเป็นที่ห่างไกล มักเป็นที่ลาดชันและสภาพดินเสื่อมโทรม การขนย้ายต้นกล้า อุปกรณ์และเครื่องมือเข้าไปในแปลงฟื้นฟู และการกลับเข้าไปเพื่อทำการการตัดหญ้า ใส่ปุ๋ย และการติดตามการเจริญเติบโตของกล้าไม้ มักมีความลำบากอย่างยิ่ง แรงงานและผู้ที่เกี่ยวข้องมักจะไม่เต็มใจที่จะทำงานที่ยากลำบากเช่นนี้ การฟื้นฟูป่าอัตโนมัติ จึงเป็นวิธีการที่จะเพิ่มความสำเร็จของการฟื้นฟูป่า โดยเฉพาะอย่างยิ่งการฟื้นฟูในพื้นที่ขนาดใหญ่และห่างไกล
เทคโนโลยีความก้าวหน้าล่าสุด
เช่นอากาศยานไร้คนขับ (โดรน) และการถ่ายภาพ
ขณะนี้กำลังทำให้งานฟื้นฟูป่าบางส่วนเป็นไปได้โดยอัตโนมัติเช่น: -
ความก้าวหน้าของการใช้เทคโนโลยีการฟื้นฟูป่าโดยอัตโนมัติ เช่น อากาศยานไร้คนขับและภาพถ่ายทางอากาศ ซึ่งทำให้บางส่วนของงานด้านการฟื้นฟูป่าเป็นไปได้โดยอัตโนมัติ ได้แก่
- การสำรวจพื้นที่ก่อนการฟื้นฟูและติดตามผลการฟื้นฟูที่เกี่ยวข้องกับพืชพรรณและสัตว์ป่า
- ระบุตำแหน่งต้นไม้ที่ให้เมล็ดและตำแหน่งที่ควรเก็บเมล็ด
- การหยอดเมล็ดโดยใช้โดรนเพื่อทดแทนการปลูกต้นไม้
- การดูแลกล้าไม้หลังปลูกโดยอัตโนมัติ เช่น การตัดหญ้าและใส่ปุ๋ย
ในการสำรวจทางอากาศ เพื่อประเมินสภาพพื้นที่และวางแผนวิธีการฟื้นฟู การติดตามการเจริญเติบโตของต้นไม้และการฟื้นคืนของพื้นที่ป่า สามารถทำได้อย่างง่ายดายโดยใช้อากาศยานไร้คนขับ วิดีโอด้านล่างนี้จะแสดงขั้นตอนการใช้โดรน "ดีเจไอ แฟนท่อม 4" เพื่อสำรวจพื้นที่ฟื้นฟู และขั้นตอนการใช้งานทั่วไป (สามารถดูเป็นตัวอย่างและนำไปปรับใช้กับงานวิจัยของนักศึกษาหรือผู้ที่สนใจอื่นๆได้ตามต้องการ) เพื่อเก็บข้อมูลโครงการวิจัยต่างๆ
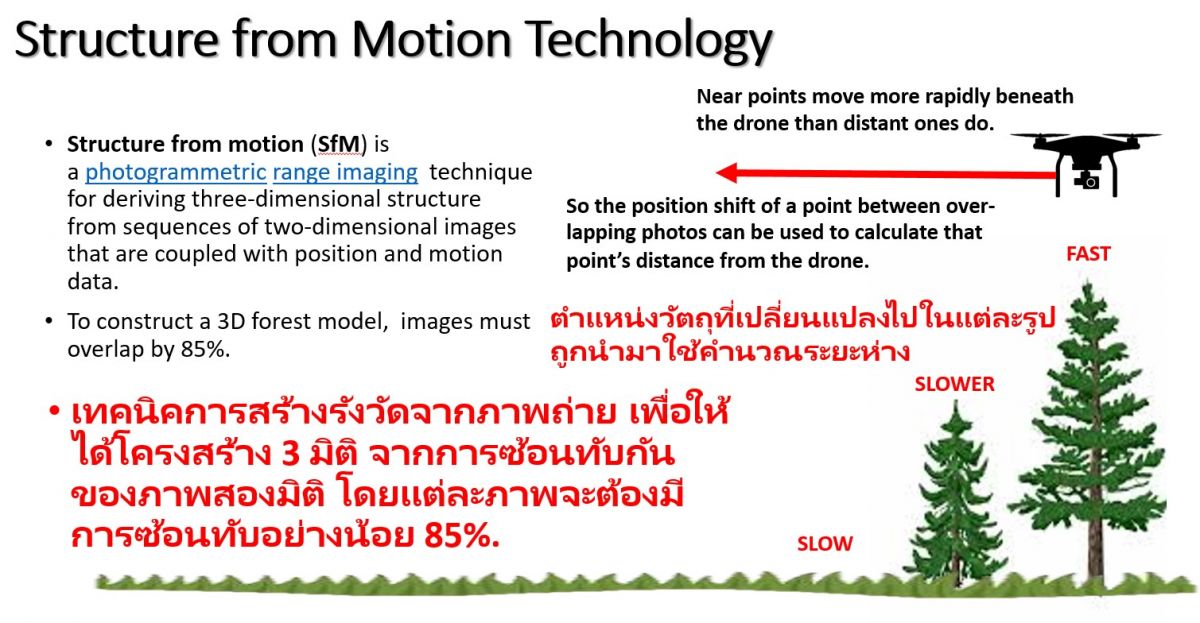
โมเดลป่าแบบสามมิติจะถูกสร้างขึ้นโดรนใช้โดรนที่หาได้ตามท้องตลาดและมีกล้องที่แยกสีที่ตามองเห็นได้ (RGB) สามารถวัดความสูงของต้นไม้ในโมเดล ซึ่งจะสามารถนำไปคำนวนหาอัตราการเจริญเติบโตของต้นไม้ได้ นอกจากนี้ยังสามารถติดตามว่าโครงสร้างของป่ามีการเปลี่ยนแปลงของไปอย่างไรเมื่อการฟื้นฟูป่าดำเนินไป
โดรนจะต้องบินที่ระดับความสูงเหนือพื้นผิวผ่านโปรแกรมไลชี่ (Litchi Flight Planner) ในกริด ซึ่งต้องมีการทับซ้อนกัน 80% ระหว่างภาพถ่ายที่อยู่ติดกัน หลังจากนั้นนำภาพทั้งหมดป้อนลงโปรแแปรม Pix4D เพื่อสร้างโมเดลสามมิติ ทุกพิกเซลในโมเดลจะถูกกำหนดด้วยค่าความสูง การคำนวณความสูงของต้นไม้มาจากความต่างระหว่างจุดสูงสุดของต้นไม้และความสูงของโดรน ณ จุดที่ถ่ายภาพ หักลบกับความสูงของโดรนเหนือพื้นผิว - รายละเอียดเพิ่มเติมแสดงในสไลด์โชว์ด้านล่างนี้
การระบุตำแหน่งพรรณไม้
หนึ่งในวิธีการระบุตำแหน่งพรรณไม้จากภาพถ่ายโดรนและวิเคราะห์ด้วยสายตาผ่านปัญญาประดิษฐ์ (AI) ซึ่งเป็นเทคโนโลยีที่เริ่มเข้ามามีบทบาทในการสำรวจพรรณไม้มากขึ้น ระบบดังกล่าวก้าวหน้าไปอย่างรวดเร็วและคาดว่าการระบุชนิดของต้นไม้ด้วย AI จะมีความน่าเชื่อถือและสามารถเข้าถึงได้มากขึ้นในอีกไม่กี่ปีข้างหน้า
การเก็บเมล็ดโดยใช้โดรนยังไม่สามารถทำได้ เทคโนโลยีที่รวมระบบการมองเห็นด้วยคอมพิวเตอร์เข้ากับแขนหุ่นยนต์นั้นถูกนำมาใช้เพื่อเก็บเกี่ยวผลไม้ในพืชสวนแล้ว แต่การเก็บเมล็ดในป่าโดยใช้โดรนยังไม่ถูกนำใช้ในเชิงพาณิชย์เนื่องจากเป็นเทคโนโลยีขั้นสูงที่ผสมผสานระหว่างอากาศยานไร้คนขับกับหุ่นยนต์บังคับ
อย่างไรก็ตามการหยอดเมล็ดทางอากาศโดยใช้โดรนเป็นเทคโนโลยีที่พัฒนาสำเร็จและใช้อย่างกว้างขวางในเชิงพาณิชย์ เช่น
ในปีพ.ศ. 2558 หน่วยวิจัยการฟื้นฟูป่าจัดอบรมเกี่ยวกับการฟื้นฟูป่าอัตโนมัติร่วมกับนักวิจัยและผู้เชี่ยวชาญทางด้านนิเวศวิทยา โครงสร้างเมล็ด การเคลื่อนไหวทางอากาศ และอื่นๆ เพื่อระดมความคิดหาวิธีการเพิ่มประสิทธิภาพในการฟื้นฟูป่า ภายหลังงานประชุมได้ตีพิมพ์วารสาร 14 ฉบับ เกี่ยวกับเทคโนโลยีที่เอื้อต่อการสำรวจพื้นที่ การเก็บเมล็ด การหยอดเมล็ดทางอากาศ การกำจัดวัชพืช และการติดตามผลการเจริญเติบโตของต้นกล้าเพื่อเป็นแรงบันดาลใจให้กับนักศึกษาบัณฑิตและผู้ที่สนใจในการพัฒนาและต่อยอดเทคโนโลยีทางด้านนี้ต่อไป สำหรับข้อมูลเพิ่มเติมเกี่ยวกับการฟื้นฟูป่าอัตโนมัติสามารถค้นหาได้จากหนังสือของหน่วยวิจัยการฟื้นฟูป่า
หรือคลิ๊กที่นี่เพื่อไปยังห้องสมุด
วาระการวิจัย ได้ถูกนำเสนอในงานประชุมระดับนานาชาติ: Reforestation for Biodiversity, Carbon Capture and Livelihoods ซึ่งเป็นงานประชุมออนไลน์ จัดโดยสวนพฤกษศาสตร์หลวงเมืองคิว (UK's Royal Botanic Gardens, Kew) ช่วงเดือนกุมภาพันธ์ 2564 ทีผ่านมา

1: การใช้ภาพถ่าย RGB จากอากาศยานไร้คนขับเพื่อหาตัวแปรบ่งชี้เชิงปริมาณของความเสื่อมโทรมและการฟื้นฟูระบบนิเวศป่าเขตร้อน
บทคัดย่อ: การจำแนกระดับของความเสื่อมโทรมของป่าเป็นสิ่งที่สำคัญสำหรับการวางแผนการดำเนินการให้มีประสิทธิภาพ เพื่อการฟื้นฟูระบบนิเวศป่าเขตร้อน...

2: การใช้ภาพถ่ายจากอากาศยานไร้คนขับเพื่อติดตามความก้าวหน้าของการฟื้นฟูระบบนิเวศป่าระยะเริ่มต้นในพื้นที่เหมืองเปิด
บทคัดย่อ: การติดตามตรวจสอบการฟื้นฟูป่าเป็นสิ่งจำเป็นเพื่อความก้าวหน้าของเทคนิคการฟื้นฟู แต่ด้วยค่าใช้จ่ายในการดำเนินการที่สูง โดยเฉพาะอย่างยิ่งในแง่ของค่าจ้างแรงงาน...

3: Multi-Scenario Simulations of Future Forest Cover Changes Influenced by Socio-Economic Development: A Case Study in the Chiang Mai-Lamphun Basin
บทคัดย่อ: การเปลี่ยนแปลงการใช้ประโยชน์ที่ดินในแอ่งเชียงใหม่-ลำพูน ประเทศไทย ได้รับอิทธิพลมาจากการพัฒนาทางเศรษฐกิจและสังคม งานวิจัยนี้ได้ใช้เทคนิค Markov-cellular automata และ Multi-layer...

4: การเปรียบเทียบการตรวจจับต้นกล้าและการวัดความสูงโดยใช้แบบจำลอง 3 มิติ จากซอฟต์แวร์สามชุด: ประยุกต์ใช้ในการฟื้นฟูป่า
บทคัดย่อ: ความท้าทายหนึ่งสำหรับการฟื้นฟูป่าคือการเฝ้าติดตามผลลัพธ์จากการฟื้นฟู โดยเฉพาะอย่างยิ่งการติดตามการรอดตายของกล้าไม้ แบบจำลอง 3...

5: การประเมินความเสื่อมโทรมของป่าโดยใช้อากาศยานไร้คนขับเพื่อการวางแผนและติดตามการฟื้นฟูระบบนิเวศป่า: ในส่วนดัชนีความเสื่อมโทรมของป่า
บทคัดย่อ: โครงการริเริ่มระดับโลก เช่น Bonn Challenge และ New York Declaration on Forests ก่อให้เกิดโครงการฟื้นฟูป่าขนาดใหญ่เพื่อต่อสู้กับความเสื่อมโทรมของพื้นที่ รักษาไว้ซึ่งความหลากหลายทางชีวภาพ...

6: ความหลากหลายเพื่อการฟื้นฟู (D4R): เป็นแนวทางในการคัดเลือกพันธุ์ไม้และแหล่งเมล็ดพันธุ์เพื่อการฟื้นฟูให้ทนทานต่อสภาพอาการของภูมิประเทศป่าเขตร้อน
บทคัดย่อ: 1. ในช่วงเริ่มต้นของทศวรรษการฟื้นฟูระบบนิเวศของสหประชาชาติ (พ.ศ. 2564–2573) มีการให้ความสำคัญระดับโลกกับการฟื้นฟูระบบนิเวศที่เสื่อมโทรมมากขึ้นกว่าที่เคย...

7: การพัฒนาดัชนีความเสื่อมโทรมของป่าเพื่อการฟื้นฟูระบบนิเวศป่าไม้โดยใช้ภาพถ่ายอาร์จีบีจากอากาศยานไร้คนขับ
บทนำ: การประเมินความเสื่อมโทรมของป่ามีความสำคัญต่อการวางแผนการฟื้นฟู การศึกษานี้เป็นการศึกษาแรกที่สร้างดัชนีความเสื่อมโทรมของป่า (forest-degradation index: FDI) โดยอาศัยข้อมูลจากอากาศยานไร้คนขับ...

8: การหาตำแหน่งและจำแนกชนิดต้นแม่ไม้เพื่อการฟื้นฟูป่าในภาคเหนือของประเทศไทยโดยใช้อากาศยานไร้คนขับ
บทคัดย่อ: การระบุตำแหน่งที่รวดเร็วและแม่นยำของต้นไม้ที่ต้องการภายในป่าเป็นสิ่งที่มีความสำคัญ หากจะบรรลุเป้าหมายการฟื้นฟูป่าทั่วโลก เช่น Bonn Challenge (มีการฟื้นฟูป่า 350 ล้านเฮคเตอร์ภายในปี ค.ศ....
9: วาระการวิจัยจังหวัดเชียงใหม่เพื่อก้าวไปสู่การฟื้นฟูป่าเเบบอัตโนมัติ
วัตถุประสงค์ที่สำคัญที่สุดสองประการของการประชุมเชิงปฏิบัติการ: การฟื้นฟูป่าแบบอัตโนมัติ (AFR) : หุ่นยนต์สามารถฟื้นฟูป่าฝนได้หรือไม่? ได้แก่ 1....
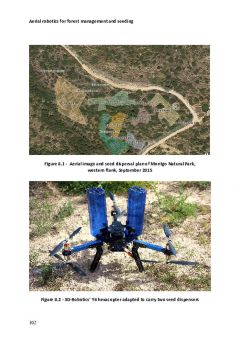
10: วิทยาการหุ่นยนต์ทางอากาศ การจัดการป่าไม้และการหว่านเมล็ด
บทคัดย่อ โดรนคอเรีย (Dronecoria) คือ โครงการฟื้นฟูป่าที่ใช้โดรนที่ผ่านการปรับแต่งได้ด้วยตนเอง (DIY) เพื่อแพร่กระจายเมล็ด (“dronechory”) ในลูกบอลดิน...